Engineering is
basically nothing but solving problems. Problems are often solved in systematic ways using theory
and experiments combined. Most engineering problems involved mathematical
modeling of the system to ease whole process of solving. This mathematical
modeling often ends up having a lot of
big, scary equations that needed to be solved. Traditionally these
equations were solved using pen , pencils and brain alone. So it was lengthy
and error prone process. For example, in past if some company needed to install
grid station or transmission lines, all
the analysis was done with hands. It was a tedious, time consuming and error
prone process. But with the advent of computer, whole process has become very
easy. Now a lot of simulation programs are available that can help us develop
our systems without even understanding underlying theories and mathematical
modeling. These software first convert data into mathematical models and then
solve them using different iterative and other Numerical techniques.
In computational
techniques, mathematical problems are first converted into computer's
language and then solved. One such way is iterative methods. In iterative
methods, a problem is solved with some
specific computer based formulas repeatedly un till answer in specific
range of error comes. In these methods,
some rough guesses are made and then by the help of algorithms, problems
are solved iteratively until error is within range. Although these methods
don't give 100% exact answers, but still they are used. As in mathematical
modeling , answer with some errors can be used.
We have developed some
computational methods to solve non- linear equations in MATLAB. In following
paragraphs, we tried to compare them with different parameters.
First equation
f(x) = e-x -
x
Bracketing methods
Bracketing methods are solved with two guesses such that root of the
equation lines in between these two methods. In these methods convergence is
assured but they take more time and iterations to solve equations.

This is one such example where f(x) is a function while blue dots are initial
guess and black dot is root of the function.
1) Bisection
It is also called incremental search as in each iteration, interval is
halved.
A simple formula is used in this case.
Xnew=(x0+x1)/2


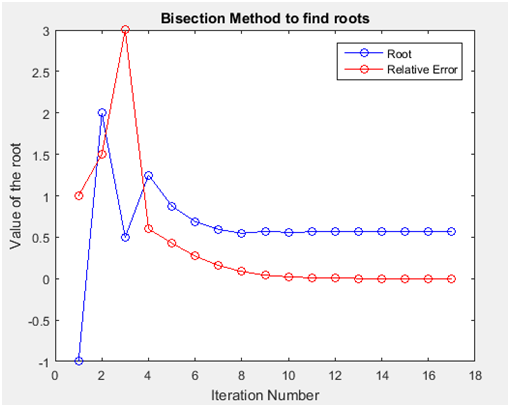
See how error is first
decreasing very fast and then speed becomes slow and ultimately it becomes
constant.
2) False Position Method
This method is also
bracketing but its algorithm is different. It joins f(xlower) and f(upper )
with straight line. Then this line's intersection with x axis is located and
this is used as new guess untill error becomes very small.
Formula for this method
is

This method is much
improved w.r.t. to Bisection. It uses less number of iterations and less time.
So it converges more rapidly.


3)Modified False Method
This method is also
identical to False position, In fact it is modified version of False position.
Only modification made here is that if same side of interval is used more than
once, then value of that function is used by dividing 2 to power number of
times same interval is used. It should
converge faster than False position.


Open Methods:
Close methods are more
accurate , they require only one guess
and mostly requires less time(Not true always). One big advantage of this
method is that we can use almost any guess although a more rough guess will
make it harder and slower to find solution.
It may or may not
converge. So these methods can't be used for any equations.
4) Fixed Point Iteration
This is simples method
of all these. In this method equation is rearranged and one x is taken out then
value is substituted and iterations are performed. So for a function f(x) , we use x=g(x) and
initial guess is substituted. This
method is simplest but also slowest. It requires more number of iterations then
any of the following. Time required for this method greatly depends upon
function.


5)
Secant Method
Secant method is like
false position method but it don't requires
close interval. It actually uses
Newton Raphson method with derivation's approximation as follows

Formula for this method
is as follows

This method is fast
like Newton Raphson but requires much less time as derivation is a big problem
to evaluate in computers. Note that it uses much less iterations and time
compared to other methods describes so far.


6) Improved Secant Method
It is a improved
version of secant method. Small perturbation
change is used in this method. as follows



Note that it requires
less time and no of iterations.


7) Newton Raphson
In this method, a
tangent is drawn from the point of initial guess and extended to x-axis.
Intersection with x-axis provides next guess and this way it is solved
iteratively.
Formula for this method
is as follows




Note that it requires
much more time than any other method.
Conclusion:
Time of Execution:
For time point of view
Modified Secant method is best and Newton Rapshon is worst.

Number of iterations used
On this base Newton
Raphson and Modified Secant methods are best and Fixed point iteration is worst
as expected. It is often observed that newton Raphson requires less no of
iterations but more time.

On average, Modified Secant Method is best among all.
References:
Applied Numerical Methods with MATLAB for Engineers 3ed by
Steven C. Chapra
Greetings!
ReplyDeleteEvaluating scientific computing methods is essential for optimizing performance and accuracy in simulations. Discover more insights into these methodologies with hostingmella!
ReplyDeleteThe blog is quite interesting
ReplyDeleteb2b portal development services